

Микроторпеды — новое универсальное подводное оружие
Текст и автор патента: Владимир Михайлович Палецких, подполковник в отставке
Современное состояние науки и техники позволяет осуществлять разработки новых бесшумных микроторпед с использованием анаэробного двигателя Стирлинга специальной конструкции, которые можно будет применять как антиторпеды, анти-антиторпеды, имитаторы шумов, микроторпеды со взрывной боевой частью, роботизированные модули, оборудованные искусственным интеллектом.
В данной статье предлагается к ознакомлению только пропульсивный — двигательно-движительный — комплекс микроторпеды калибра 100÷120 мм. Системы самонаведения, управления, боевая часть и т.д. не рассматриваются.
Миниатюризация
Миниатюризация — это непрерывный процесс развития технических систем, основными задачами которого являются уменьшение габаритов, массы и стоимости, при одновременном повышении надёжности, экономичности и эффективности за счет совершенствования схемотехнических, конструкторских и технологических методов.
Компонентная база микроэлектроники и современные сверхмощные взрывчатые вещества позволяют создавать системы управления, наведения и боевые части микроторпед уже сегодня. Но небольшой быстроходный двигательно-движительный комплекс доставки этого оборудования к цели в глубоководной морской среде пока не создан, т.к. механика, в отличие от электроники, требует другого подхода.
Как оказалось, для минимальных размеров таких устройств, как микроторпеда, тепловые энергетические силовые установки имеют однозначный приоритет над электротягой за счет способности иметь очень высокое среднее рабочее давление в двигателе и тем самым выдавать большую мощность (обеспечивать высокую скорость и минимальное время поражения цели), а электродвигателям не хватает плеча, чтобы создать требуемый высокий крутящий момент.
Уменьшение калибра торпеды позволит решать многочисленные задачи по защите надводных кораблей и подводных лодок, а также уничтожение мин, буев, дронов, станций, или использовать их в качестве имитаторов физических полей, разведчиков, и т.п., сохраняя при этом большие торпеды для «больших» целей.
Микроторпеды найдут применение и в противолодочной авиации для увеличения области активного поиска и повысят вероятность обнаружения и уничтожения подводных лодок противника.
Сегодня уже никого не нужно агитировать за малые торпеды – все понимают их важную роль в устойчивости при противостоянии боевых единиц.
По этому поводу приведу отрывок из интервью академика разработчика торпед, Алиева Ш.Г.:
«— Сегодня совершенствование торпедного вооружения разворачивается в сторону сильного уменьшения габаритов и массы. Двухтонные семиметровые монстры ещё, конечно, послужат, но уже созданы и показывают замечательные результаты 50—килограммовые миниторпеды.
— Она во многом эффективнее, чем двухтонная. Засечь её сложно, поскольку нет шума. Малые торпеды идут почти беззвучно, акустикам сложно понять, какой косяк на лодку движется, рыбный или торпедный.
— С другой стороны, малыми торпедами нагнетается напряжение, что соответствует сегодняшним запросам. Раньше перед военными стояла задача уничтожить противника, сейчас есть задача вымотать его, посеять неуверенность в себе, панику, свести с ума. Когда на одной субмарине установлено максимально до 30 торпед, а вокруг крутятся десятки субмарин и противолодочных кораблей, на которые можно наткнуться, что делать?» [1].
Главное оружие противоторпедной обороны
Противник имеет в составе НАТО несколько приморских стран, которые активно разрабатывает свои виды подводных средств поражения [2], [3], поэтому мы, даже по количеству разработок и выделенным на это средствам, не можем состязаться с ними по этой тематике, и должны искать «свой путь» для увеличения возможностей активной противоторпедной защиты.
Одним из «своих путей» видится создание микроторпед в различных вариантах исполнения. Миниатюризация торпед обосновывается наличием задач и целей, для которых использовать тяжелые торпеды нецелесообразно.
На подводной лодке должны появиться микроторпеды различного назначения, как в комплекте боевых частей тяжелых торпед-носителей, так и в пусковых установках. Возможно, даже вне прочного корпуса, при этом направление выстрела особого значения не имеет в связи с высокой маневренностью микроторпед. Наличие современного оборонительного антиторпедного противодействия может являться мощным фактором выживания. Антиторпеды становятся главным оружием противоторпедной обороны, как для надводных кораблей, так и подводных лодок. Они играют исключительно важную роль в условиях противоборства с подводными лодками и надводными кораблями противника. Это позволяют даже слабой лодке выигрывать бой у сильной и современной, даже будучи обнаруженной противником. Увеличение боекомплекта микроторпед на подводной лодке, где имеется дефицит свободных объемов, требует от последних уменьшения массогабаритных показателей. Это позволит взять на борт их большее количество.
Из-за малых габаритов изделия усложняется обнаружение опасности противником, появляется возможность создавать более обширные имитационные поля воздействия.
Микроторпеда – это новый эффективный класс вооружения подводных лодок и надводных кораблей, повышающий их боевые возможности и устойчивость в боевой обстановке. Задачи поразить подводную лодку микроторпедой не ставится, так как мала боевая часть, но она позволяет эффективно решать массу других задач.
Например, микроторпеды позволяют проводить не только разведку и обеспечивать оборону (в качестве антиторпед), но и нападение, как активные средства торпедной скорректированной групповой атаки в качестве ложных целей. Эта возможность позволяет посеять неуверенность противника в себе, создать панику, вымотать его и заставить совершить ошибку. Например, при атаке с большого расстояния подводной лодки противника несколькими тяжелыми торпедами, одна-две тяжелые торпеды-носители из залпа могут быть снаряжены несколькими «анти-анти-торпедами», снабженными имитаторами шумов тяжелых торпед,. Это вызывает атаку антиторпед противника, что заставит его израсходовать запас антиторпед и потерять боевую устойчивость.
Такая система, наделенная искусственным интеллектом, создает возможность имитации торпедного залпа в виде скоординированной групповой атаки цели, используя при этом «рой» микроторпед. Таким образом, противник не сможет оперативно определить ложные цели. Да и антиторпед для отражения атаки в таком количестве «торпед» в залпе может не быть на борту, что увеличивает вероятность его поражения.
Причем, в торпеду калибра 533 мм спокойно помещается 12 шт. микроторпед калибра 120 мм или 19 шт. 100 мм.
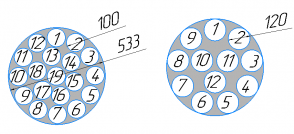
Рис. 1. Расположение микроторпед калибра 100 и 120 мм в теле тяжелой торпеды калибра 533 мм.
Важная составляющая микроторпеды – это наделение её возможностями самостоятельного обнаружения целей в сочетании с маневренностью, высокой скоростью, акустической скрытностью. Это открывает большие перспективы по разработке новых тактик торпедных атак.
Из-за малых габаритов изделия и бесшумного хода усложняется обнаружение опасности противником, появляется возможность создавать более обширные поля, установленными в микроторпедах станциями имитации физических полей. С их помощью аппараты будут воспроизводить шум и электромагнитное поле полноразмерной подлодки того или иного типа, имитацию различных атак на цель, отвлечение сил и средств на купирование атаки. Этот фактор заставит противника раскрыть все возможные средства обороны, что даст нападающим эффективно увидеть и использовать слабые его стороны. А это открывает большие перспективы по разработке новых тактик торпедных атак.
Данную тактику нападения противнику будет трудно отразить, т.к. «рой» микроторпед будет отвлекать внимание, на который противнику придется реагировать и тратить время, от чего появляется реальная возможность пропустить торпеду. Противник, выходя в море, будет бояться «теней», вынужден будет реагировать на любой «шорох» в океане и включать свои системы освещения обстановки, тем самым обнаруживая себя.
Вместо генераторов физических полей, микроторпеды можно оснастить различными датчиками для обнаружения физических полей подводных лодок, и использовать их в качестве мобильной пространственной подводной антенны. Компактность, как одно из условий формирования эффективной многопозиционной распределенной системы зависит, первую очередь, от количества элементов (датчиков) и их оптимального распределения. Одним из логичных требований, вытекающих из этого, является разумное ограничение массогабаритных характеристик новых средств поиска. Благодаря большой дальности хода микроторпед, такая самостоятельно подвижная антенна позволит увеличить область поиска подводных средств противника, сэкономит моточасы корабля, а затем, после выполнения задачи, микроторпеды сами подойдут к кораблю для эвакуации и перезарядки.
Неограниченная глубина погружения позволяет уничтожать объекты, находящиеся на недоступной для других торпед глубине.
Еще одним важным применением микроторпеды является использование её для имитации практических стрельб (по аналогии стрельбы из вкладных стволов в артиллерии, где вместо стрельбы штатным снарядом стреляют пулями).
В этом случае макет тяжелой торпеды снаряжается пусковой установкой для микроторпеды. Выстрел осуществляется либо макетом – из него выходит микроторпеда, либо сразу выстреливает микроторпеда, выполняя движение по траектории в соответствии с заданием. Макет всплывает возле корабля и подбирается краном. И так как стоимость микроторпеды в таком исполнении будет невысокой, то появляется возможность чаще проводить тренировки и лучше подготовить экипажи и расчеты торпедным стрельбам.
Имеется еще одно «нестандартное» использование микроторпеды – осуществлять её доставку ближе к цели посредством стрельбы из Реактивных бомбометных установок (РБУ). Например, с целью прикрепить маячок на резиновое противогидролокационное покрытие корпуса подводной лодки. А далее, возможности скрыться у этой лодки равны нулю, со всеми вытекающими последствиями.
Уменьшение калибра микроторпеды стало возможным благодаря двигателю большой агрегатной мощности, а именно – двигателю Стирлинга с линейным расположением поршней. Причем площадь рабочего поршня сопоставима с площадью поперечного сечения микроторпеды.
Высокая агрегатная мощность двигателя Стирлинга достигается однотактным комбинированным циклом с двухконтурным тепловым преобразователем температуры, линейным (тандентным) расположением поршней и линейным преобразователем движения поршневого штока во вращение валов. Это и позволяет увеличить мощность.
Высокий эффективный КПД двигателя (благодаря этому показателю у микроторпеды увеличенная дальность хода) обеспечивается более качественным протеканием термодинамического цикла за счет функции выстоя вытеснительного поршня в мертвых точках, запирающего вытеснительный объем расширения, но оставляющий открытым объем сжатия. Это заставляет рабочее тело двигаться в рабочий цилиндр и совершать там работу без возможности отсоса в вытеснительный цилиндр до завершения расширения. А во втором контуре отработанное рабочее тело, почти без сопротивления, перемещается в открытый в это время вытеснительный объем сжатия другого контура – происходит параллельно-последовательная работа двух контуров. Каждый рабочий такт происходит в противофазе, что позволяет рабочему поршню при любом перемещении осуществлять рабочий такт. Это позволяет более полно использовать теплоту рабочего тела и увеличить ход рабочего поршня.
Цикл Стирлинга совпадает с максимально достижимым КПД тепловых машин, а сам двигатель позволяет создавать в своем внутреннем контуре очень высокое давление рабочего тела, недоступное другим тепловым двигателям. Тем самым можно существенно увеличить крутящий момент и повысить энерговооруженность микроторпеды. К тому же, данный двигатель работает по замкнутому циклу, и глубина погружения торпеды для него не имеет значения.
Термодинамический КПД двигателя Стирлинга при разности температур 50 ºС холодильника и 815 ºС нагревателя достигает 70%, но механизм преобразования возвратно-поступательного движения поршней во вращение выходного вала (типа КШМ, косой или качающейся шайб) «классического» двигателя не позволяет «вести» термодинамический цикл с четкой синхронизацией и разделением тактов.
Суть предлагаемого двигателя в том, что рабочий поршень движется возвратно-поступательно без выстоев, а вытеснительный поршень совершает возвратно-поступательные движения с выстоями в мертвых точках. Это позволяет обеспечить запирание каналов движения рабочего тела со стороны вытеснителя и направления всего горячего рабочего тела в рабочий цилиндр для производства работы. При этом длинноходный преобразователь движения имеет КПД преобразования порядка 95% и позволяет снимать крутящий момент более продолжительно, а система запирания рабочего тела вытеснителем позволяет осуществлять продолжительное расширение. Поэтому общий КПД предлагаемого двигателя, с учетом даже разных потерь, ожидается более 50%.
К тому же, беспульсационное движение рабочего тела в рабочий цилиндр и обратно позволяет тепловому преобразователю температуры работать в идеальных условиях, что также сказывается на общем КПД. В «классических» конструкциях движение рабочего тела осуществляется толчками (резонансно). Не успев попасть в рабочий цилиндр и расшириться, оно уже отсасывается в вытеснительный цилиндр. Происходит передавливание рабочего тела из холодной в горячую полость, что отнимает энергию при рабочем такте. Поэтому границы смежных тактов накладываются один на другой, заставляя тепловой преобразователь температуры работать в условиях постоянного колебания движения рабочего тела и меняющейся температуры. То есть, в крайне неблагоприятных условиях, так как необходимые для устойчивой работы такого двигателя фазовые соотношения объемов горячей и холодной полостей, образующиеся при колебательном режиме, возможны только при короткоходной амплитуде перемещений поршней. Всё это уменьшает и термический КПД, и механический КПД преобразования, и, в результате, эффективный КПД.
Двухцилиндровая конструкция самого оптимального двигателя Стирлинга α-типа с кривошипно-шатунным преобразователем, также обладающим вышеперечисленными недостатками, у которого цилиндры расположены V-образно, делает невозможным его использование в микроторпеде из-за пространственной конфигурации. Переоборудование такого двигателя поршнями двухстороннего действия, чтобы получить однотактный цикл и дополнительную мощность, очень сложно. Поэтому к «классическим» двигателям Стирлинга сложилось заслуженное скептическое отношение. [3]
Предназначение микроторпеды предполагает однорежимный (максимально скоростной) вариант работы её пропульсивной системы, не предусматривающий регулировку изменений частоты и амплитуды перемещения силового штока, хотя возможно установить дополнительные механизмы, позволяющие регулировать скоростные параметры, но это целесообразно делать для микроторпед, выполняющими функции обеспечения.
Пропульсивный комплекс предлагаемой к рассмотрению торпеды включает в себя:
-
линейно расположенный однотактный двигатель с внешним подводом теплоты;
-
преобразователь движения силового штока поршней во вращение гребных валов, длинноходный преобразователь движения;
-
трансмиссию;
-
два гребных вала контрвращения;
-
движитель, включающий, по меньшей мере, один качающийся гребной винт;
-
насадку и/или гибкое сопло водомета.

Рис. 2. Пропульсивный комплекс микроторпеды по патенту РФ № 2757339. [4]
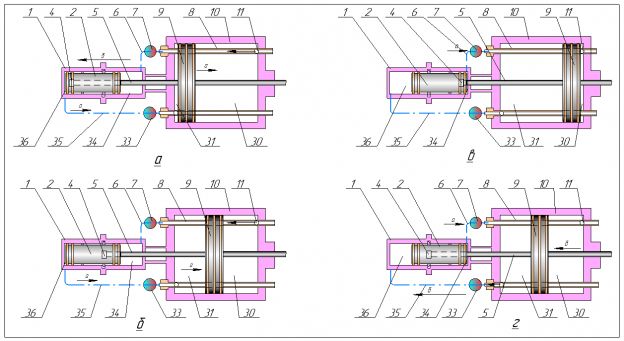
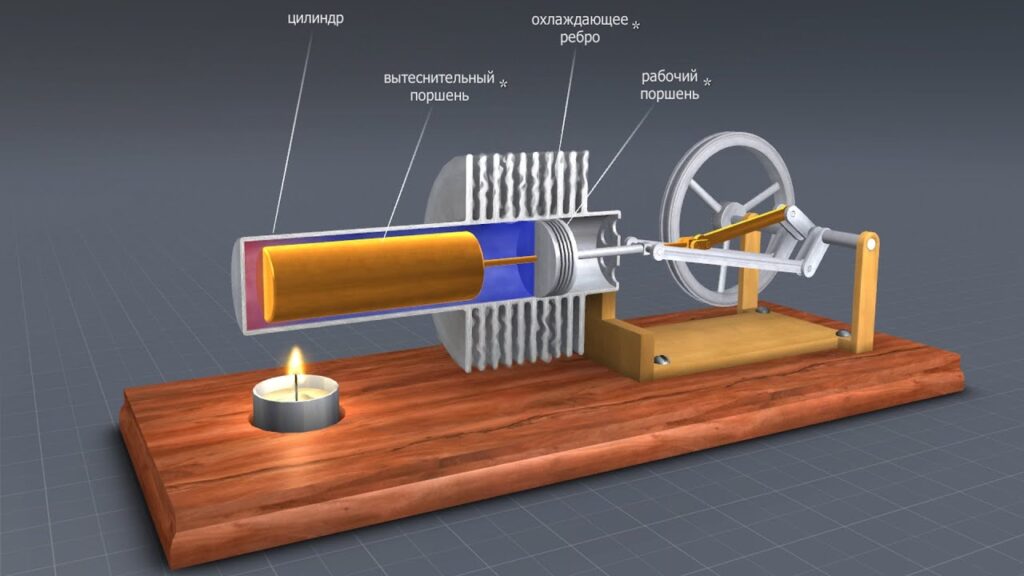
Рис. 3. Схема работы двигателя с внешним подводом теплоты (Стирлинга).
Принцип работы однотактного двигателя с внешним подводом теплоты основан на разности температур – это попеременный нагрев и охлаждение рабочего тела, заключенного в изолированных пространствах контуров двигателя.
В работу двигатель запускается посредством одновременного или поочередного впуска рабочее тело газообразного рабочего тела в полости 31, 30 рабочего цилиндра 10 из трансмиссионного отделения 29 торпеды, являющимся картером двигателя. , в которой установлены, или оно само, является емкостью высокого давления для хранения рабочего тела. Впуск рабочего тела в эти полости происходит через отверстия 68 в трубках 8 при холодных нагревателях. При установке обоих поршней в среднее положение, дальнейшее перемещение обоих поршней 2, 9, осуществляется посредством вращения электрического стартера 19. При этом рабочее тело принудительно прогоняется по полостям 30, 31, 34, 36 обоих цилиндров 1, 10. Во время поступления рабочего тела под давлением во все полости, или после этого (зависит от теплопроводности материала нагревателя), происходит разогрев топлива и химического реактора компонентами топлива, вступающими в экзотермическую реакцию. Тепло передается в нагреватели рабочего тела, и тем самым обеспечивается запуск двигателя. Затем стартер 19 отключается и переходит в режим генератора 19. Вращающаяся под действием шатуна 12 ведущая коническая шестерня 13, через трансмиссию (кинематически связывающую все подвижные элементы силовой установки) вращает генератор 19, и, если для преодоления мертвых точек не будет хватать маховой массы якоря генератора 19, то дополнительно устанавливается маховик 28.
В качестве топлива для обеспечения анаэробной работы двигателя Стирлинга может быть применена система с реагентами, дающими экзотермическую реакцию. Таких пар много, но самая известная система — со сжиганием жидкого лития в шестифтористой сере. [2]
Работа указанной системы основана на экзотермической реакции между литием и шестифтористой серой (SF6, элегаз): 8Li+SF6→6LiF+Li2S+Q. Литий находится в камере сгорания сменного тепловыделяющего элемента. Он является микроканальным нагревателем, заполняя его в твердом виде лишь частично.
Жидкая шестифтористая сера до ввода в камеру сгорания хранится в отдельной емкости. При комнатной температуре давление пара шестифтористой серы составляет примерно 2 МПа. Это давление используется для подачи реагента через форсунку. Литий перед реакцией находится в расплавленном виде. Это нетрудно обеспечить, поскольку точка плавления лития составляет всего 180,54°C. Для инициирования реакции можно воспользоваться пиротехническим составом «перекись натрия – алюминий». Этот состав воспламеняется от небольшого воспламенителя и за 1 секунду нагревает литий до 700°C. Продукты реакции также являются расплавами, и из-за особенностей исходной смеси лития и шестифтористой серы занимают почти тот же объем, что и исходные топливные реагенты. Это выгодно для подводной энергетической системы как экономически, так и технически.
Реакция между литием и шестифтористой серой отличается высоким энерговыделением. Установку тепловыделяющего элемента, заполненного топливом, можно осуществлять как в заводских условиях, так и на корабле. Возможно создание других типов неразборного химического тепловыделяющего элемента, способного автоматически работать в замкнутой системе двигателя с достаточно высокой теплоотдачей.
Чистый SF6 (элегаз) нетоксичен и биологически нейтрален. Испытания, проведенные на животных, показали, что при наличии элегаза в концентрации до 80% и 20% кислорода неблагоприятные эффекты отсутствуют, что регулярно подтверждается на новом элегазе перед его поставкой. Для проверки мышей помещают на 24 часа в атмосферу, состоящую на 80% из SF6 и на 20% – из кислорода (биологическое исследование, рекомендованное Международной электротехнической комиссией МЭК 376).
Работа двигателя происходит следующим образом.
При перемещении вытеснителя 2 вперед по стрелке «б», он выдавливает из полости 36 рабочее тело в канал 35 и запирает его, направляя весь рабочее тело в тепловой преобразователь 33, и, по мере прохождения рабочего тела через тепловой преобразователь 33, в котором его давление возрастает, и он вынужден переместиться в переднюю полость 31 рабочего цилиндра 10, где воздействует на рабочий поршень 9, который начинает перемещаться назад по стрелке «а» под действием расширяющегося рабочего тела (фиг. 3а), совершая работу. Выдавливаемое рабочее тело из задней полости 30 рабочего цилиндра 10 по трубе 8 и каналу 6 свободно перемещается в полость 34 вытеснительного цилиндра 1, по пути охлаждаясь, проходя через тепловой преобразователь 7.
При расширении рабочего тела, которое перемещает рабочий поршень 9 (фиг. 3б) назад по стрелке «а», давление в передней полости 31 рабочего цилиндра 10 постепенно снижается. Рабочий поршень 9, продолжая двигаться назад, вытесняет остатки рабочего тела из уменьшающегося задней горячей полости 30 рабочего цилиндра 10 в увеличивающуюся заднюю холодную полость 34 вытеснительного цилиндра 1 и принимает в нее охлажденный рабочее тело.
Далее, когда рабочий поршень 9 пройдет примерно 2/3÷3/4 (это расстояние зависит от настроек двигателя, свойств рабочего тела, характеристик теплового преобразователя, и других факторов, которые являются «ноу-хау» и в патенте не прописаны) своего хода по стрелке «а» до крайнего заднего положения, толкатель 4 вытеснительного штока 5 упирается в задний внутренний торец вытеснителя 2 и начинает перемещать его назад по стрелке «а», открывая полость 36 канала 35 (фиг. 3в) для впуска отработанного рабочего тела из передней «горячей» полости 31 рабочего цилиндра 10, в переднюю «холодную» полость 36 вытеснительного цилиндра 1, где давление меньше. При этом горячее рабочее тело последовательно проходит через тепловой преобразователь 33, где оно охлаждается перед поступлением в переднюю «холодную» полость 36 вытеснительного цилиндра 1. Вытеснитель 2, двигаясь назад по стрелке «б», заталкивает рабочее тело в канал 6, и по достижению крайнего заднего положения, запирает канал 6, а рабочее тело, проходя через тепловой преобразователь 7, нагревается и поступает в заднюю полость 30 рабочего цилиндра 10, где воздействует на рабочий поршень 9 и перемещает его назад по стрелке «а».
Если в качестве преобразователя движения используется кривошипно-шатунный преобразователь движения, то он вынуждает рабочий поршень 9 дойти до задней мертвой точки, при этом вытеснив всё рабочее тело из задней полости 30 рабочего цилиндра 10 в тепловой преобразователь 7 канала 6, и плавно и безударно останавливает перемещение силового штока 5. Но и вытеснитель 2 уже втолкнул холодное рабочее тело из задней полости 34 вытеснительного цилиндра 1 в канал 6 и запер этот канал, и рабочее тело, перемещаясь по этому каналу 6, последовательно, уже в обратном порядке, проходит через тепловой преобразователь 7, где оно нагревается, и готово поступить по трубе 8 через её отверстие 11 в заднюю полость 30 горячего рабочего цилиндра 10. Далее, шатун 12, под воздействием ведущей шестерни 13 и маховика 28, преодолевает сопротивление поступающего рабочего тела в заднюю полость 30, принудительно дожимает поступившее в неё рабочее тело, и, после преодоления мертвой точки, начинает перемещение рабочего поршня вперед 9 (фиг. 3г) по стрелке «б», которому способствует поступающее через отверстие 11 в трубе 8 в заднюю полость 30 расширяющийся рабочее тело с высоким давлением.
Поскольку процесс нагрева с расширения рабочего тела протекает при более высоком среднем давлении, чем процесс охлаждением с сжатием, двигатель совершает полезную работу.
Далее, цикл повторяется.
Ключевые преимущества анаэробной энергоустановки на основе двигателя с внешним подводом теплоты – это отсутствие зависимости скорости и дальности от глубины и высокая удельная мощность благодаря конструкции с раздельным расположением цилиндров, выстоями вытеснителя и однотактной работы двигателя.
Еще одно преимущество двигателя Стирлинга — это принцип его работы, характеризующийся предельно низким уровнем шума, который даже ниже, чем у электрических двигателей. Комплекс может быть оснащен преобразователем движения, который также не является источником шума, но безударно ограничивает диапазон перемещения штока поршня. При отсутствии выхлопа, и, соответственно, следности, применение высокоскоростного водометного движителя с всеракурсно управляемым вектором тяги, такая микроторпеда позволяет осуществить скрытную атаку на любой глубине, легко маневрирует даже будучи длинномерной, и осуществляет поражение цели в любую точку.
Трансмиссия содержит электрический стартер-генератор, содержащий полый якорь, который установлен на внешнем гребном валу. После запуска двигателя, стартер используется как генератор для питания электрического привода маломощных устройств по доставке в химический реактор компонентов экзотермической реакции, отвода отработавшего расплава, вращения мотора водяной помпы для охлаждения горячих элементов и рабочего тела, работы рулевых механизмов и систем двигателя, а также выполняет функцию маховика и др.
В качестве основного элемента движителя применен качающийся винт, позволяющий производить массоперенос воды не только винтовым вращением, но одновременно качанием винта, позволяющего осуществлять махи лопастей, т.е. работать еще и как поршень, при этом объем перемещаемой винтом воды за один борот увеличивается почти в 2 раза. Гибкая труба водомета движителя имеет механизм поджатия давления, чтобы уменьшить коэффициент скольжения винта, увеличивая упор, а выходное сопло с рулевым кольцом и мягкой манжетой сопрягает наружный ламинарный и внутренний турбулентный потоки, тем самым снижает гидродинамический шум внутри водомета. Рулевое кольцо, оборудованное концентрическим спрямляющим аппаратом, позволяет отклонение в любую сторону, тем самым менять вектор упора всеракурсно. Такая система руления обеспечивает высокую маневренность даже для излишне длинных микроторпед. Высокая скорость, маневренность, дальность и бесшумность хода, увеличение диапазона рабочих глубин, независимость скорости торпеды от давления среды – всё это повышает вероятность определения микроторпедой местоположения малошумных тяжелых торпед и их поражение с высокой вероятностью.
На рис. 4 представлен двухвинтовой движитель с качающимся винтом 4, и с соосным гребным винтом 7 противоположного вращения.

Рис.4. Качающийся винт.
Внутренний гребной вал 1 оборудован косым кривошипом 6, установленным под углом, оптимально, 20° к продольной оси гребного вала 1. На косой кривошип 6 посажена ступица 8 гребного винта 4 с возможностью свободного вращения на косом кривошипе 6 посредством посадки ступицы 8 на скользящий подшипник. При этом внутренний гребной вал 1 вращается в сторону выходящих кромок лопастей гребного винта 4, а внешний гребной вал 2 оборудован концевиком с, по меньшей мере, одним ребром 5, которым вращает качающийся гребной винт 4 в сторону входящих кромок его лопастей. Для оборудования движителя винтами контрвращения, на концевике внутреннего гребного вала 1 устанавливается задний гребной винт 7 с направлением работы по направлению вращения гребного вала 1. При вращении гребных валов, гребной винт 4 получает возможность качания от оси «б—б» до оси «в—в» в секторе «п», а его лопасти создают упор одновременно посредством винтового и машущего (как поршень) воздействия на водную среду. Причем, угол атаки α лопастей 4 должен коррелировать с углом наклона косого кривошипа 6.
Ступица 8 качающегося (переднего) гребного винта 4 выполнена сферической с плоскими торцами (полюсами), через которые проходит косой кривошип 6 внутреннего гребного вала 1, а сам качающийся гребной винт 4 может быть оборудован лопастями фиксированного или регулируемого шага. Для вращения качающегося гребного винта 4 и создания упора его винтовым вращением, предназначен внешний гребной вал 2, который оборудован, по меньшей мере, одним приводным ребром 5, которым вращает за комли качающийся гребной винт 4 в сторону входящих кромок его лопастей.
По отдельности или вместе, двигатель с внешним подводом теплоты и качающийся винт могут быть применены и на «тяжелых» торпедах и автономных аппаратах.
Описание работы пропульсивного комплекса торпеды можно найти в патенте РФ № 2757339. [4]
Технический результат при реализации изобретения заключается в:
- увеличении скорости посредством увеличения ометаемой площади качающегося винта;
- существенном увеличении крутящего момента посредством увеличения рабочей площади силового поршня двойного действия;
- увеличении дальности хода;
- расширении диапазона рабочих глубин;
- снижении шумности;
- отсутствии следности;
- неизменности массы микроторпеды в течение всего времени её движения.
Данное торпедное оружие критически важно для обеспечения боевой устойчивости и увеличения боевых возможностей подводных лодок и надводных кораблей, а также для обучения расчетов стрельбе торпедами.
Широкий спектр применения
Микроторпеды могут применяться и в мирной жизни, например, сегодня в мировой экономике всё большую роль играют вопросы освоения и рационального использования ресурсов Мирового океана и шельфа. Одним из средств повышения качества и эффективности подводных исследований и работ являются автономные анаэробные необитаемые подводные аппараты. К числу наиболее актуальных направлений применения таких аппаратов относят: обзорно–поисковые и геологоразведочные работы, инспекцию подводных сооружений и коммуникаций, океанографические исследования и мониторинг водной среды, подледные работы и др.
Важную роль в создании автономных необитаемых подводных аппаратов (АНПА) играет обеспечение дальности плавания и автономности, требуемых для решения поставленных задач, при ограниченных запасах энергии на борту аппарата. Для решения этой задачи в условиях ограничений по массе и габаритам АНПА, осуществляется внедрение перспективных технических решений, имеющих ряд особенностей по сравнению с традиционными. Как показал анализ научно-технических публикаций, одними из основных объектов исследований и разработок в области создания АНПА являются нетрадиционные двигательно-движительные комплексы.
Кстати, двигатель Стирлинга может с успехом применяться в сухопутной военной технике, особенно, предназначенной для «северов», т.к. погодные условия зимой позволяют достичь большей разности температур, что повышает его термический КПД, при этом тепла он выделяет больше, чем двигатель внутреннего сгорания, поэтому в условиях севера может применяться как когенерационная установка – для обогрева личного состава с одновременной выработкой электричества.
Предлагаемое схемно-техническое решение позволит также оснастить микроторпедами легкие боевые робототехнические комплексы или оснащенные искусственным интеллектом надводные и подводные необитаемые аппараты, способные с высокой степенью автономности вести определенные боевые действия без участия человека. Их широкое применение для решения боевых задач в морской среде приведет к коренному пересмотру основных принципов ведения современной войны.
Предлагаемый Двигатель может быть использован для создания:
- перспективных видов вооружения (микро- или антиторпед), военной и специальной морской и наземной техники;
- технологий новых и возобновляемых источников энергии, включая водородную и ядерную энергетику;
- технологий поиска, разведки, разработки месторождений полезных ископаемых и их добычи на морском дне и на других планетах;
- технологии наземных и космических энергосберегающих систем транспортировки, распределения и использования энергии, в том числе, сверхпроводимых электрических систем.
Основным покупателем двигателя Стирлинга могут стать следующие ведомства:
1. Министерство Обороны – торпеды, АНПА, сухопутные дроны, полевые станции зарядки аккумуляторов, энергетические установки кораблей и подводных лодок.
2. Исследовательские морские организации – изучение мирового океана.
3. Службы охраны надводной и подводной частей акваторий, которые включают:
- военно-морские порты и сооружения;
- гражданские порты (пассажирские, грузовые, наливные);
- морские буровые платформы, как стоящие на дне, так и полупогружные;
- трубопроводы, кабели и коммуникации, проходящие по дну;
- объекты энергетики на берегах акваторий;
- АЭС.
Также потенциальными потребителями проекта могут стать ведомства:
- Роскосмос – энергетические солнечные или изотопные установки.
- Росатом – энергетические атомные или изотопные установки.
- Объединённая судостроительная корпорация – двигательный комплекс судов.
- Интер РАО ЕЭС – ко- или тригенерационные энергетические установки.
- ТЭК – системы сжижения природного газа.
- Авиапром – станции зарядки аккумуляторов или питания для электрических ЭУ самолетов.
- ЖКХ – бесшумные многотопливные электрогенераторы.
Представленная разработка может быть использована техническими специалистами для разработки новых технологических решений в области боевой робототехники, а также военными специалистами для разработки и обоснования новых тактик морского боя, а также форм и способов вооруженной борьбы с учетом перспектив развития робототехнических комплексов военного назначения, позволяет существенно расширить количество тактических сценариев, которые могут быть реализованы морским командиром в целом.
Список литературы и источников
[1] Статья «Почему идеолог российского торпедного оружия чертит формулы на воротах и на асфальте» (–https://zen.yandex.ru/media/belrus/pochemu–ideolog–rossiiskogo–torpednogo–orujiia–chertit–formuly–na–vorotah–i–na–asfalte—60b6610e5e69223deb5e7992), дата обращения 30.10.2021г.
[2] Г. Ридер, Ч. Хупер. Двигатели Стирлинга. М.: Мир, 1986, стр.390—391
[3] Двигатель Стирлинга (https://ru.wikipedia.org/wiki/Двигатель_Стирлинга), дата обращения 30.10.2021г.
[4] Патент РФ № 2757339 (https://patenton.ru/patent/RU2757339C1), дата обращения 30.10.2021г.